48V無刷直流電機驅動原理及控制器電路圖
來源:深圳市鑫海文科技有限公司|發(fā)布時間:2020-01-07 17:54
直流無刷電機目前根據(jù)規(guī)格有按電流和電壓分的,也有根據(jù)產(chǎn)品應用分的���。今天小編就帶大家了解一下48V的無刷直流電機驅動控制原理及電路圖�。
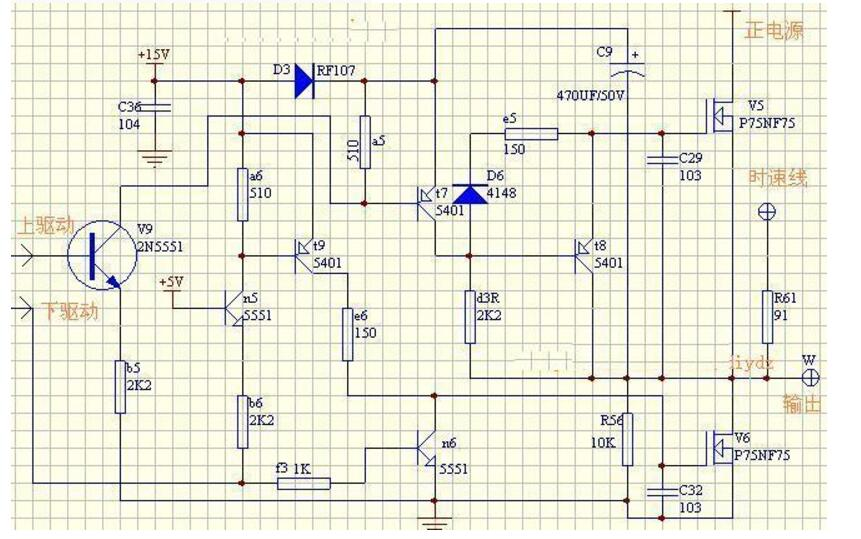
48V無刷電機控制器驅動電路圖:
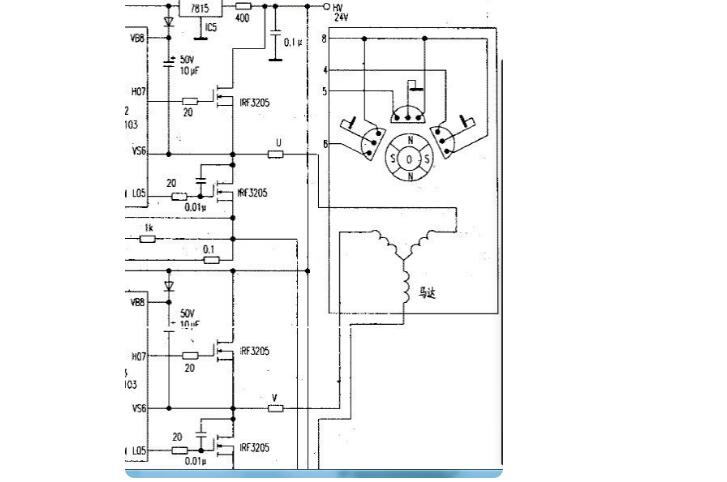
48V無刷電機48V接線原理:
八根線�����,三根粗線是黃藍綠個別產(chǎn)品有所不一樣�,五根霍爾線���,紅黑藍綠黃���。五根霍爾線里面紅黑絕對不可以接錯顏色�����,其他三根細線按顏色接�。三根粗線按顏色接���,接上之后也可能會電機發(fā)抖�����,不轉�����,反轉���,可以把三根粗線隨意搭配連接,細線除了紅黑不能亂�,其他的三根也可以隨意搭配連接�����。
48V無刷直流電機的工作原理:
48V無刷直流電機采用方波自控式永磁同步電動機,以霍爾傳感器取代電刷換向器�����,霍爾傳感器的信號線傳遞電動機里面磁鋼相對于繞組線圈的位根據(jù)3個霍爾傳感器的信號能知道此時應該怎樣給電動機的線圈供電(不同的霍爾信應該給電動機繞組提供相對應方向的電流)�����,也就是說霍爾傳感器狀態(tài)不一樣���,線圈的置號電流方向不一樣�����。
霍爾信號傳遞給控制器,控制器通過粗線(不是霍爾線)給電動機繞組供電���,電動機旋轉,磁鋼與繞組(準確地說是纏在定子上的線圈�����,其實霍爾一般安裝在定子上)發(fā)生轉動�����,霍爾傳感器感應出新的位置信號�����,控制器粗線又給重新改變電流方向的電動機繞組供電���,電動機繼續(xù)旋轉(當繞組和磁鋼的位置發(fā)生變化時�,繞組必須對應地改變電流方向,這樣電動機才能繼續(xù)向一個方向運動�,否則電動機就會在某一個位置左右擺動�,而不是連續(xù)旋轉)�����,這個過程就是電子換向���。
48V無刷直流電機由直流電源供電���,借助位置傳感器來檢測轉子的位置�,所檢測出的信號觸發(fā)相應的電子換相線路�����,以實現(xiàn)無接觸式換相�����。
48V無刷直流電機用電子開關和位置傳感器代替電刷及換向器,將直流電轉換成模擬三相交流電�,通過調制脈寬���,改變其電流大小來改變轉速���。
48V直流無刷電機的控制原理:
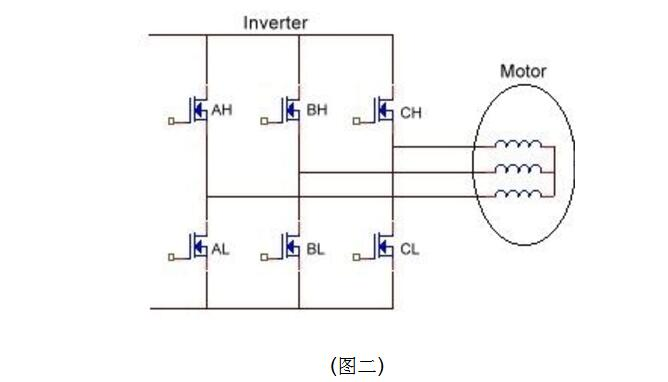
要讓電機轉動起來,首先控制部就必須根據(jù)HALL-SENSOR感應到的電機轉子目前所在位置,然后依照定子繞線決定開啟(或關閉)換流器(INVERTER)中功率晶體管的順序�����,如下(圖二)INVERTER中之AH、BH、CH(這些稱為上臂功率晶體管)及AL�、BL�����、CL(這些稱為下臂功率晶體管),使電流依序流經(jīng)電機線圈產(chǎn)生順向(或逆向)旋轉磁場,并與轉子的磁鐵相互作用���,如此就能使電機順時/逆時轉動。當電機轉子轉動到HALL-SENSOR感應出另一組信號的位置時,控制部又再開啟下一組功率晶體管�,如此循環(huán)電機就可以依同一方向繼續(xù)轉動直到控制部決定要電機轉子停止則關閉功率晶體管(或只開下臂功率晶體管)�;要電機轉子反向則功率晶體管開啟順序相反�����。
基本上功率晶體管的開法可舉例如下:
AH�、BL一組→AH�、CL一組→BH、CL一組→BH���、AL一組→CH、AL一組→CH���、BL一組,但絕不能開成AH�����、AL或BH���、BL或CH�、CL。此外因為電子零件總有開關的響應時間,所以功率晶體管在關與開的交錯時間要將零件的響應時間考慮進去���,否則當上臂(或下臂)尚未完全關閉���,下臂(或上臂)就已開啟�����,結果就造成上�、下臂短路而使功率晶體管燒毀�����。
當電機轉動起來���,控制部會再根據(jù)驅動器設定的速度及加/減速率所組成的命令(COMMAND)與HALL-SENSOR信號變化的速度加以比對(或由軟件運算)再來決定由下一組(AH�、BL或AH�����、CL或BH�、CL或……)開關導通���,以及導通時間長短���。速度不夠則開長�,速度過頭則減短,此部份工作就由PWM來完成���。PWM是決定電機轉速快或慢的方式,如何產(chǎn)生這樣的PWM才是要達到較精準速度控制的核心���。
高轉速的速度控制必須考慮到系統(tǒng)的CLOCK分辨率是否足以掌握處理軟件指令的時間�,另外對于HALL-SENSOR信號變化的資料存取方式也影響到處理器效能與判定正確性、實時性�����。至于低轉速的速度控制尤其是低速起動則因為回傳的HALL-SENSOR信號變化變得更慢�����,怎樣擷取信號方式���、處理時機以及根據(jù)電機特性適當配置控制參數(shù)值就顯得非常重要���。
或者速度回傳改變以ENCODER變化為參考�����,使信號分辨率增加以期得到更佳的控制�。電機能夠運轉順暢而且響應良好�,P.I.D.控制的恰當與否也無法忽視。之前提到直流無刷電機是閉回路控制���,因此回授信號就等于是告訴控制部現(xiàn)在電機轉速距離目標速度還差多少,這就是誤差(ERROR)���。知道了誤差自然就要補償,方式有傳統(tǒng)的工程控制如P.I.D.控制�。但控制的狀態(tài)及環(huán)境其實是復雜多變的�����,若要控制的堅固耐用則要考慮的因素恐怕不是傳統(tǒng)的工程控制能完全掌握,所以模糊控制���、專家系統(tǒng)及神經(jīng)網(wǎng)絡也將被納入成為智能型P.I.D.控制的重要理論。
本文由鑫海文(www.d3ge.com)原創(chuàng)首發(fā)�,轉載請以鏈接形式標明本文地址或注明文章出處!





 在線客服
在線客服